1.WINDOWS安装wsl2 + ubuntu20.04
【原创】最实用的Win10/11系统下WSL2+Ubuntu20.04的全流程安装指南(迁移至 D 盘方法)_wsl安装ubuntu-CSDN博客
2.安装环境conda python torch 等
sudo apt update
sudo apt install -y git wget curl build-essential cmake ninja-build pkg-config
sudo apt install -y libgl1 libglib2.0-0 sudo apt install -y mesa-utils libegl1 libgl1-mesa-glx libgtk2.0-0
sudo apt install -y mesa-utils libegl1 libgl1-mesa-glx libgtk2.0-0
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh
bash Miniconda3-latest-Linux-x86_64.sh
source ~/.bashrc
conda –version
conda create -n splatam python=3.10
conda activate splatam
conda install -c “nvidia/label/cuda-11.6.0” cuda-toolkit
conda install pytorch==1.12.1 torchvision==0.13.1 torchaudio==0.12.1 cudatoolkit=11.6 -c pytorch -c conda-forge
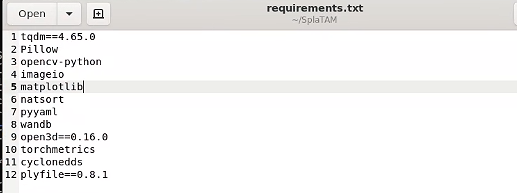
pip install -r requirements.txt
问题1:CUDA版本过高
步骤 1:卸载当前不匹配的 PyTorch
# 确保在splatam环境里
conda activate splatam
# 卸载现有torch
pip uninstall -y torch torchvision torchaudio步骤 2:安装适配 CUDA 11.6 的 PyTorch
# 用清华PyTorch镜像源安装1.12.1+cu116(核心提速!)
pip install torch==1.12.1+cu116 torchvision==0.13.1+cu116 torchaudio==0.12.1 -i https://pypi.tuna.tsinghua.edu.cn/simple --extra-index-url https://download.pytorch.org/whl/cu116问题2:wandb登录问题
wandb – 注册、获取 API Key_wandb 官网-CSDN博客
新复刻 参考
Ubuntu20.04下配置SplaTAM_ubuntu安装splatam-CSDN博客
存在问题就是将依赖改为
单独安装pip install kornia==0.7.1 –no-deps pip install torchmetrics==1.0.0 pip install lpips
运行思路目前
在Ubuntu20.04用ROSBAG记录扫描数据做成标准TUM数据集,拷贝到splatam根目录下
覆盖后点击输入(记得改帧数目-(在),改相机参数,分辨率)
python scripts/splatam.py configs/my_splatam.py 跑脚本建图
python viz_scripts/final_recon.py configs/my_splatam.py 看最终结果图
gazebo仿真
根据
Ubuntu20.04 Gazebo中仿真宇树机器狗和外置激光雷达_宇树机器狗go2的gazebo仿真-CSDN博客
两个推荐文章复现
添加相机插件 gazeboROS官方支持 深度相机
打开仿真环境
source devel/setup.bash
- roslaunch unitree_guide gazeboSim.launch rname:=go2
- rosrun unitree_guide junior_ctrl
自定义地图,模型(支持STL)方法如下: